


泉源:《中国舰船研究》
作者:王耀南 安果维 王传成 莫洋 缪志强 曾凯

一、海内外研究现状
1.外洋智能无人系统研究现状
(1)陆地无人系统
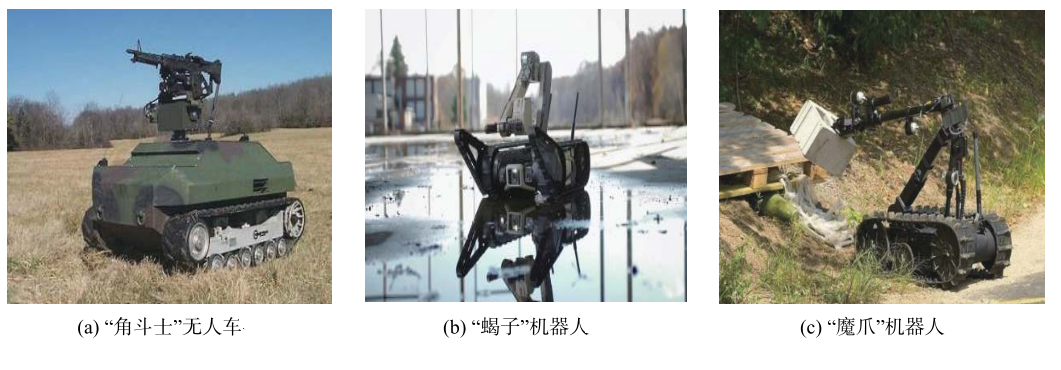
图1 美国陆地无人系统
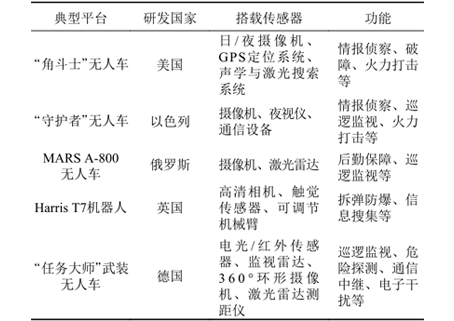
表1 各国陆地无人系统
(2)空中无人系统
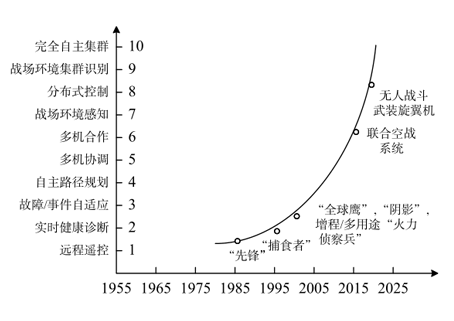
图2 自主控制水平与无人机自主化趋势

图3 各国空中无人系统
(3)海洋无人系统

图4 各国海洋无人系统
2.海内智能无人系统研究现状

图5 我国空中无人系统
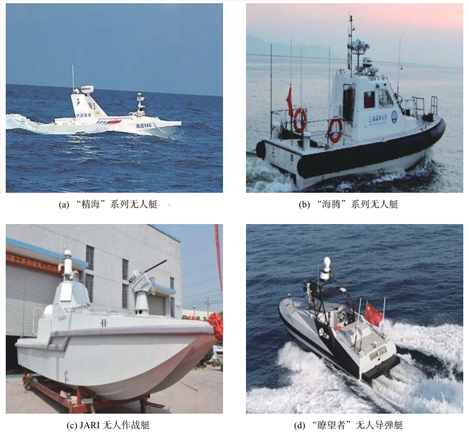
图6 我国海洋无人系统
3.手艺现状总结
二、智能无人系统要害手艺
1.重大情形下自主感知与明确手艺
(1)多模态传感融合自主感知手艺
(2)重大场景目的识别与明确手艺
2.行为决议与轨迹妄想手艺
(1)多源异构情形下的行为决议手艺
(2)动/静情形下的轨迹妄想手艺
(3)重大场景下的轨迹跟踪手艺
3.自主导航定位手艺
(1)基于惯性/卫星深度信息融合的导航定位手艺
(2)基于惯性/天文信息融合的导航定位手艺
(3)基于视觉跟踪的导航手艺
(4)地球物理辅助导航手艺
4.多场景自主手艺学习与智能控制手艺
(1)使命的自主手艺学习手艺
(2)自主作业交互控制手艺
(3)类人智能控制的无人系统运动控制手艺
5.无人集群协同控制手艺
(1)智能无人系统集群局部规则控制手艺
(2)智能无人系统集群软控制手艺
(3)智能无人系统集群领航控制手艺
(4)智能无人系统人工势场控制手艺
6.自然人机交互手艺
(1)智能无人系统人机交互手艺
(2)智能无人系统增强现实与混淆现实手艺
(3)智能无人系统脑机接口手艺
三、智能无人系统未来的生长趋势
1.认知智能顺应重大使命情形
2.自主作业提升单机使命能力
3.算法芯片化实现高实时响应
4.通用化的架构提升集群互操作性
5.跨域协同突破集群应用界线
6.清静网络包管集群可靠应用
7.人机混淆智能提升对抗能力
四、结语






